

 联系我们
联系我们

ABB机器人安装和设置
使用ABB机器人进行Pickit的设置包括4个步骤:
- 检查控制器和软件兼容性
- 设置网络连接
- 加载程序文件
- 使用Pickit测试机器人连接
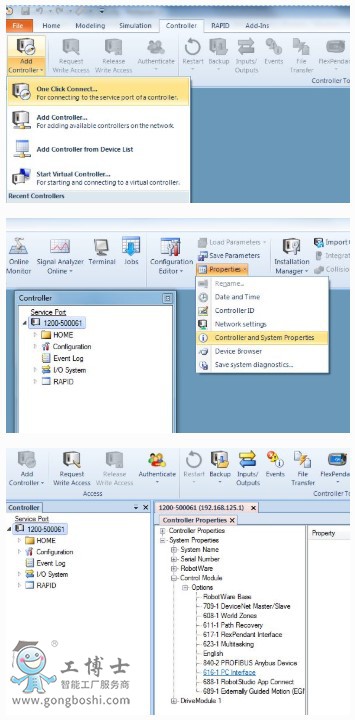
检查控制器和软件的兼容性
Pickit与带有RobotWare 5或6的IRC5版本的控制器兼容。要与Pickit通信,需要安装以下控制器模块:
- 616 PC接口
- 623-1多任务
要检查此兼容性,请打开RobotStudio并执行以下步骤:
如果没有正确的软件版本或模块,请联系当地的ABB经销商。
设置网络连接
硬件连接
Pickit处理器必须使用以太网电缆连接到机器人控制器。
该以太网电缆应插入:
- Pickit处理器的 ROBOT端口;
- 机械手控制器的 WAN端口。
IP配置
打开RobotStudio,然后执行以下步骤:
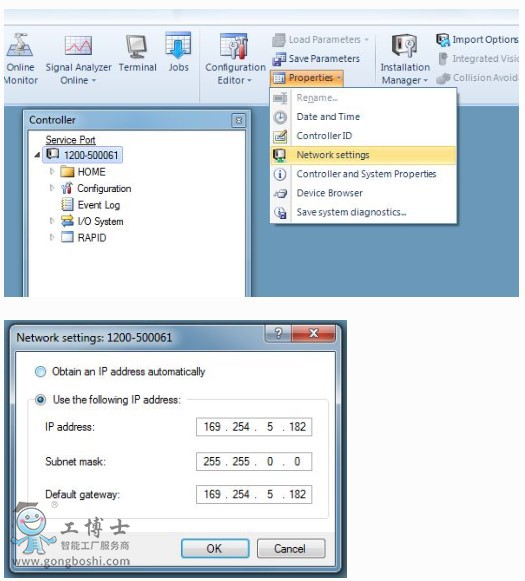
*好将控制器的IP地址设置为 169.254.5.182 ,这是与Pickit IP在同一子网中的IP地址,并将子网掩码设置为255.255.0.0。
机械手的IP地址不能与Pickit的IP地址相同。
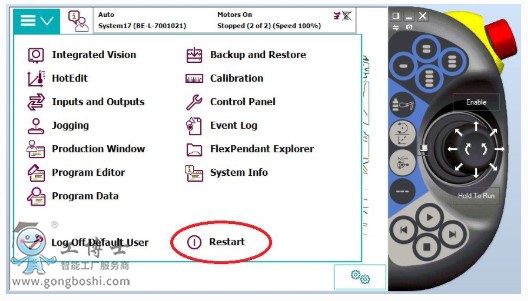
这些步骤之后,从Flex挂件重新启动(假设您还没有写访问权限)。
加载程序文件
将文件上传到机器人
使用文件传输上传这些文件。
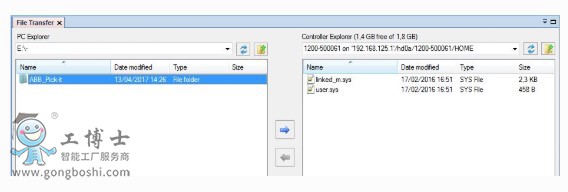
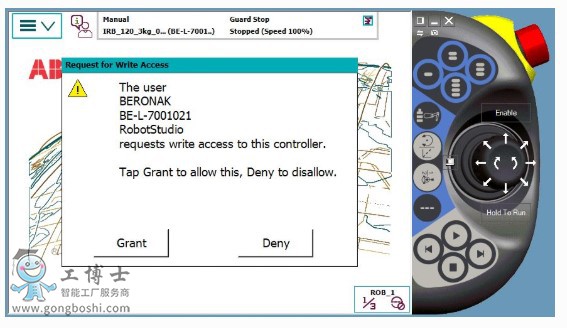
- 手动模式:按Flex吊坠上的“授予”
- 自动模式:不必要
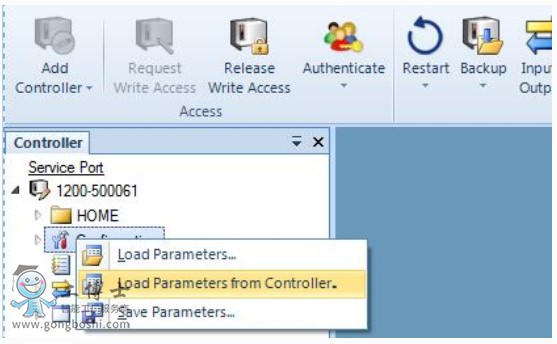
从控制器加载参数
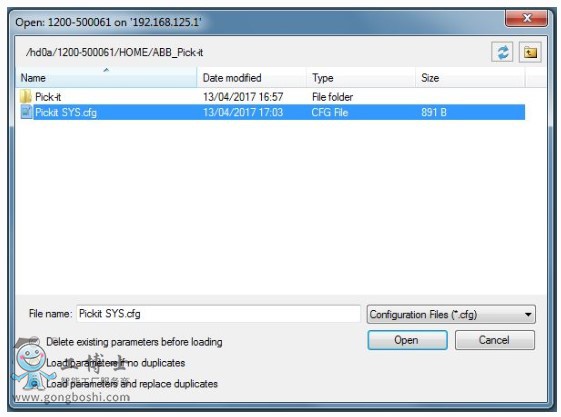
- 对于带有RobotWare 5的ABB控制器,选择Pickit SYS RW5.cfg文件。
- 对于带有RobotWare 6的ABB控制器,选择Pickit SYS RW6.cfg文件。
- 对于ABB YuMi,选择Pickit SYS YuMi.cfg文件。
这将在相应任务中加载所需的系统模块。
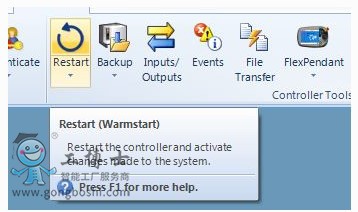
重新启动控制器。
![~C8MS1DVR_]Y6WV$)QXF%LN](http://www.gongboshi.com/file/upload/202310/26/17/17-18-35-88-29679.png "点击打开原图")